基础算法
随机变量
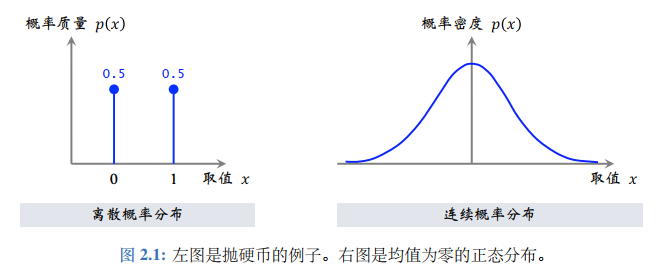
随机变量X: 一个不确定量,取决于一个随机事件的结果。观测值x: 一个确定量,是一次随机事件的观测结果。累计分布误差(CDF): F X ( x ) = P ( X ≤ x ) F_X(x)=\mathbb{P}(X\le x) F X ( x ) = P ( X ≤ x ) F X : R → [ 0 , 1 ] F_X:\mathbb{R}\to[0,1] F X : R → [ 0 , 1 ] 概率质量函数(PMF): 离散概率分布,即变量取值范围χ \chi χ
∑ x ∈ χ p ( x ) = 1 \sum_{x\in\chi}p(x)=1 ∑ x ∈ χ p ( x ) = 1 h ( x ) h(x) h ( x ) X X X E X ∼ p ( ⋅ ) [ h ( x ) ] = ∑ x ∈ χ p ( x ) ⋅ h ( x ) \mathbb{E}_{X\sim p(\cdot)}[h(x)]=\sum_{x\in\chi}p(x)\cdot h(x) E X ∼ p ( ⋅ ) [ h ( x )] = ∑ x ∈ χ p ( x ) ⋅ h ( x )
概率密度函数(PDF): 连续概率分布,即变量取值范围χ \chi χ
∫ − ∞ x p ( u ) d u = F X ( x ) \int_{-\infty}^x p(u)du=F_X(x) ∫ − ∞ x p ( u ) d u = F X ( x ) ∫ R p ( x ) d x = 1 \int_\mathbb{R}p(x)dx=1 ∫ R p ( x ) d x = 1 p ( x ) = F X ′ ( x ) p(x)=F^{'}_X(x) p ( x ) = F X ′ ( x ) h ( x ) h(x) h ( x ) X X X E X ∼ p ( ⋅ ) [ h ( x ) ] = ∫ χ p ( x ) ⋅ h ( x ) d x \mathbb{E}_{X\sim p(\cdot)}[h(x)]=\int_{\chi}p(x)\cdot h(x)\:dx E X ∼ p ( ⋅ ) [ h ( x )] = ∫ χ p ( x ) ⋅ h ( x ) d x
蒙特卡洛示例
估计圆周率
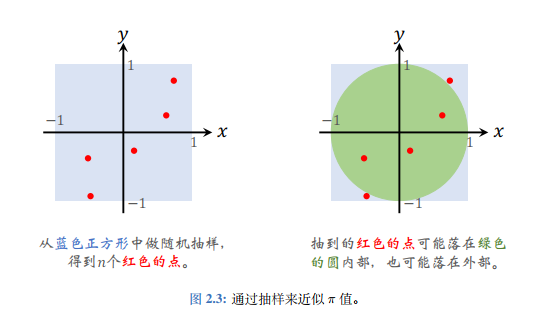
蒙特卡洛方法 (Monte-Carlo methods)也被称为统计模拟方法,是一种基于概率统计的数值计算方法。运用蒙特卡洛方法时,我们通常使用重复随机抽样,然后运用概率统计方法来从抽样结果中归纳出我们想求的目标的数值估计。
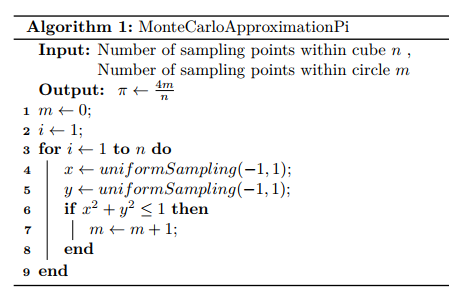
均匀生成n个[ − 1 , 1 ] [-1,1] [ − 1 , 1 ] p = π 4 p=\frac{\pi}{4} p = 4 π
设圆内点数量为随机变量M M M E [ M ] = p n = π 4 ⋅ n \mathbb{E}[M]=pn=\frac{\pi}{4}\cdot n E [ M ] = p n = 4 π ⋅ n m m m π n 4 \frac{\pi n}{4} 4 πn π = 4 m n \pi=\frac{4m}{n} π = n 4 m
Python代码实现如下:
import numpy as npdef MonteCarloApproximationPi (n ): m = 0 x_lst = np.random.uniform(-1 , 1 , size=n) y_lst = np.random.uniform(-1 , 1 , size=n) for x, y in zip (x_lst, y_lst): if x ** 2 + y ** 2 <= 1 : m += 1 pi = 4 * m / n return pi
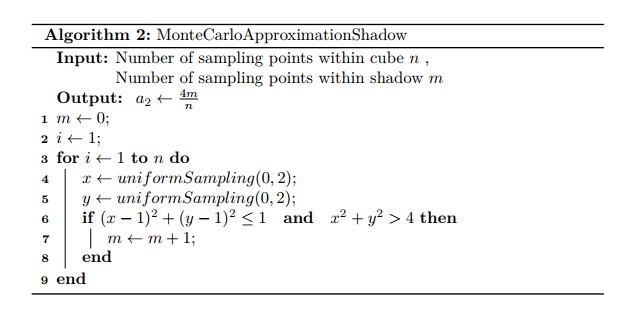
估计阴影面积
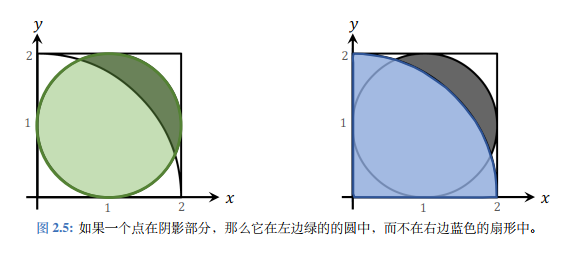
求下图中阴影部分面积可采用蒙特卡洛估计进行,其内圆为圆心( 1 , 1 ) (1,1) ( 1 , 1 ) 1 1 1 2 2 2
求解思路 :若在正方体内均匀采样n n n p = a 2 a 1 = a 2 4 p=\frac{a_2}{a_1}=\frac{a_2}{4} p = a 1 a 2 = 4 a 2 a 1 a_1 a 1 a 2 a_2 a 2 M M M a 2 a_2 a 2 E [ M ] = n p = n a 2 4 \mathbb{E}[M]=np=\frac{na_2}{4} E [ M ] = n p = 4 n a 2 m m m a 2 ≈ 4 m n a_2 \approx \frac{4m}{n} a 2 ≈ n 4 m
Python代码实现如下:
import numpy as npdef MonteCarloApproximationShadow (n ): m = 0 x_lst = np.random.uniform(0 , 2 , size=n) y_lst = np.random.uniform(0 , 2 , size=n) for x, y in zip (x_lst, y_lst): if (x - 1 ) ** 2 + (y - 1 ) ** 2 <= 1 and x ** 2 + y ** 2 > 4 : m += 1 a_2 = 4 * m / n return a_2
蒙特卡洛应用
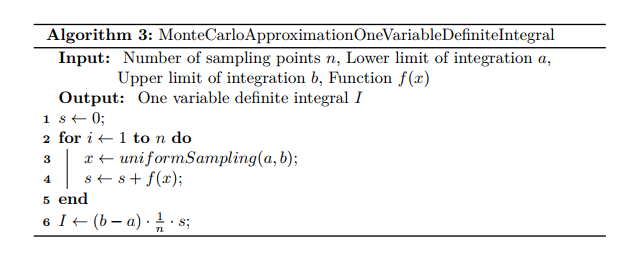
一元定积分估计
I = ∫ a b f ( x ) d x I=\int_a^b\:f(x)\:dx
I = ∫ a b f ( x ) d x
import mathimport numpy as npdef MonteCarloApproximationOneVariableDefiniteIntegral (n, a, b, f ): x_lst = np.random.uniform(a, b, size=n) I = (b - a) / n * np.sum (list (map (f, x_lst))) return I if __name__ == "__main__" : f = lambda x : (1 + math.sin(x) * math.log(x, math.e) ** 2 ) ** (-1 ) i = MonteCarloApproximationOneVariableDefiniteIntegral(100 , 0.8 , 3 , f) print ("100个点近似:" , i) i = MonteCarloApproximationOneVariableDefiniteIntegral(10000 , 0.8 , 3 , f) print ("10000个点近似:" , i) i = MonteCarloApproximationOneVariableDefiniteIntegral(1000000 , 0.8 , 3 , f) print ("1000000个点近似:" , i)
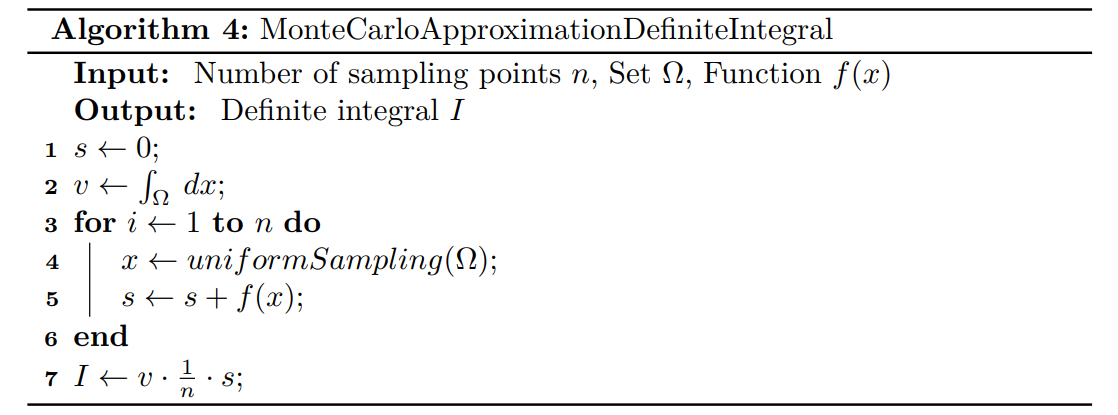
多元定积分估计
I = ∫ Ω f ( x ) d x I=\int_\Omega\:f(x)\:dx
I = ∫ Ω f ( x ) d x
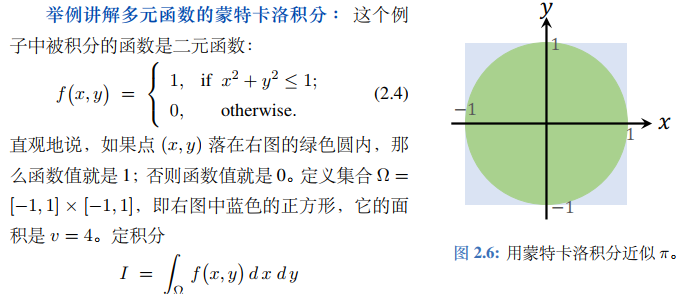
此处以二元定积分为例进行求解:
import mathimport numpy as npdef MonteCarloApproximationDefiniteIntegral (n, omega_x, omega_y, f ): x_lst = np.random.uniform(omega_x[0 ], omega_x[1 ], size=n) y_lst = np.random.uniform(omega_y[0 ], omega_y[1 ], size=n) v = (omega_x[1 ] - omega_x[0 ]) * (omega_y[1 ] - omega_y[0 ]) I = v / n * np.sum (list (map (f, zip (x_lst, y_lst)))) return I if __name__ == "__main__" : f = lambda cor : 1 if cor[0 ] ** 2 + cor[1 ] ** 2 <= 1 else 0 i = MonteCarloApproximationDefiniteIntegral(100 , (-1 , 1 ), (-1 , 1 ), f) print ("100个点近似:" , i) i = MonteCarloApproximationDefiniteIntegral(10000 , (-1 , 1 ), (-1 , 1 ), f) print ("10000个点近似:" , i) i = MonteCarloApproximationDefiniteIntegral(1000000 , (-1 , 1 ), (-1 , 1 ), f) print ("1000000个点近似:" , i)
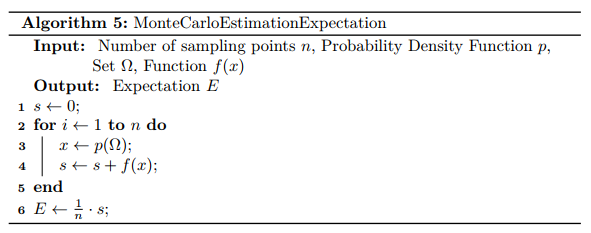
期望估计
E X ∼ p ( ⋅ ) [ f ( x ) ] = ∫ Ω p ( x ) ⋅ f ( x ) d x \mathbb{E}_{X\sim p(\cdot)}\big[f(x)\big]=\int_{\Omega}p(x)\cdot f(x)\:dx
E X ∼ p ( ⋅ ) [ f ( x ) ] = ∫ Ω p ( x ) ⋅ f ( x ) d x
根据期望密度函数p ( x ) p(x) p ( x ) x x x
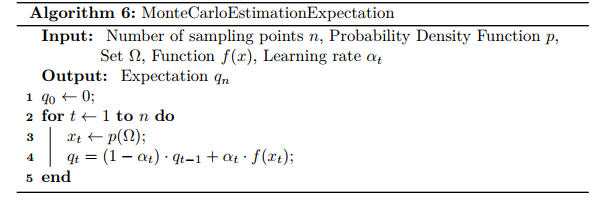
为降低内存开销,进一步使用递推式计算上述估计,Robbins-Monro 算法思路如下:
import mathimport numpy as npdef MonteCarloEstimationExpectation (n, f, omega, alpha ): i = 0 q = 0 while i < n: x = np.random.normal(loc=1 , scale=2 , size=1 ) if omega[0 ] <= x <= omega[1 ]: q = (1 - alpha) * q + alpha * f(x) i = i + 1 return q if __name__ == "__main__" : f = lambda x : 2 * x + 10 * math.sqrt(math.fabs(x)) + 3 alpha = 0.04 i = MonteCarloEstimationExpectation(100 , f, (2 , 8 ), alpha) print ("100个点近似:" , i) i = MonteCarloEstimationExpectation(10000 , f, (2 , 8 ), alpha) print ("10000个点近似:" , i) i = MonteCarloEstimationExpectation(10000 , f, (2 , 8 ), alpha) print ("1000000个点近似:" , i)
动态规划算法
动态规划
将待求解问题分解成若干个子问题,先求解子问题,然后从这些子问题的解得到目标问题的解。动态规划会保存已解决的子问题的答案,在求解目标问题的过程中,需要这些子问题答案时就可以直接利用,避免重复计算。
最优子结构: 问题的最优解由相关子问题的最优解组合而成,且这些子问题可独立求解
使用动态规划算法时,用子问题的最优解来构造原问题的最优解
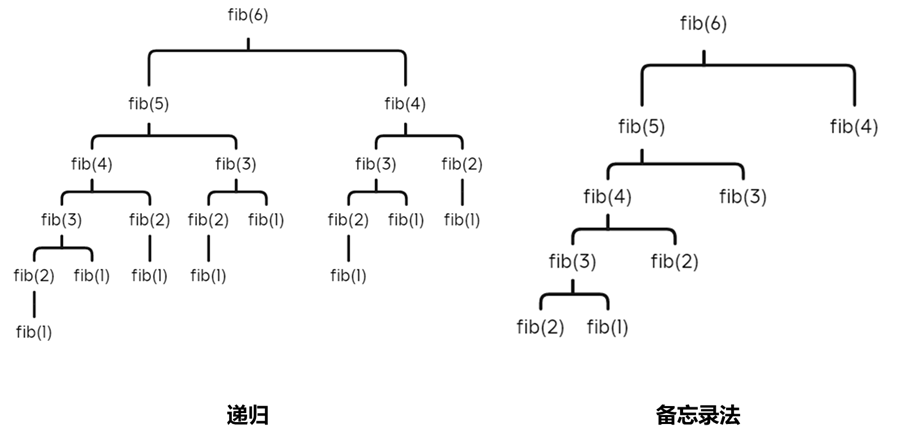
重叠子问题: 递归算法反复求解相同子问题,在动态规划算法中使用数组来保存子问题的解,从而通过查表代替重复求解
记录方式主要包括备忘录法(自顶而下) 、自底而上
动态规划主要使用底子而上的方式进行求解,从而避免了额外的递归调用开销。
斐波那契数列
斐波那契数列通过递归调用方式实现:
def fib (n ): if n <= 0 : return 0 elif n == 1 : return 1 return fib(n-1 ) + fib(n-2 )
使用备忘录 进行自顶而下的求解:
memo用于存储斐波那契数列,初始化为-1若第i项斐波那契数列已经被计算得到,则将被存储至memo[i]中
若调用已被计算得到的第i项斐波那契数列,则直接调取memo[i]而不再递归调用子树
def fibonacci (n ): if n <= 0 : return 0 memo = [-1 for i in range (n)] return fib(n, memo) def fib (n, memo ): if memo[n-1 ] != -1 : return memo[n-1 ] elif n<= 2 : memo[n-1 ] = 1 else : memo[n-1 ] = fib(n-1 , memo) + fib(n-2 , memo) return memo[n-1 ]
使用动态规划的自底而上 思想:
def fib (n ): memo = [1 , 1 ] for i in range (1 , n): memo.append(memo[i] + memo[i - 1 ]) return memo[n-1 ]
钢条切割问题
给定一段长度为n n n p i p_i p i r n r_n r n
问题可被抽象为不断将钢铁切割为两段,每次选取收益最大的方式进行切割:
p_lst = [1 , 5 , 8 , 9 , 10 , 17 , 17 , 20 , 24 , 30 ] def cut (n ): if n<= 0 : return 0 elif n == 1 : return 1 else : r = p_lst[n-1 ] for i in range (1 , n // 2 + 1 ): r = max (r, cut(i) + cut(n-i)) return r
备忘录版将每一步存储至备忘录中:
p_lst = [1 , 5 , 8 , 9 , 10 , 17 , 17 , 20 , 24 , 30 ] def cutMemo (n ): if n <= 0 : return 0 memo = [-1 for i in range (n)] return cut(n, memo) def cut (n, memo ): if memo[n-1 ] != -1 : return memo[n-1 ] elif n == 0 : r = 0 else : r = p_lst[n-1 ] for i in range (1 , n // 2 + 1 ): r = max (r, cut(i, memo) + cut(n-i, memo)) memo[n-1 ] = r return memo[n-1 ]
动态规划则自底而上进行:
p_lst = [1 , 5 , 8 , 9 , 10 , 17 , 17 , 20 , 24 , 30 ] def cut (n ): r = p_lst[:n] for i in range (0 , n): for j in range (0 , i-1 ): r[i] = max (r[i], r[j] + r[i-j-1 ]) return r[n-1 ]
强化学习基础
专有名词
状态与观测
智能体(Agent): 动作、决策的执行者,被控对象(下棋机器人 环境(Environment): 智能体交互的对象(棋盘 状态(State): 对当前时刻环境的完备描述 ,是决策的依据(棋盘上所有棋子的位置 观测(Observation): 对当前时刻环境的部分描述 ,为状态的子集(棋盘上某一棋子附近的信息 状态空间(State Space): 所有可能存在状态的集合,记作S \mathcal{S} S 下棋的状态空间为离散有限集合 智能体通过接受观测输出动作和智能体状态,环境接受智能体动作并输出环境状态
强化学习中的状态为环境的状态,而非智能体的状态
完全可观测(Fully Observed): 智能体观测到的状态和环境的状态等价时,称环境为可观测的,此时可用马尔可夫决策过程(MDP)进行建模环境部分可观测(Partially Observed): 智能体的观测不包含环境的所有状态,称环境是部分可观测的,此时建模为可观测马尔可夫决策过程(POMDP)
动作、奖励、状态转移
动作(Action): 智能体基于当前状态所作的决策,动作的选取可存在随机性(以一定概率选取某一动作)(围棋中361个位置对应361个动作 动作空间(Action Space): 所有可能动作的集合,记作A \mathcal{A} A 围棋中A = { 1 , 2 , 3 , ⋯ , 361 } \mathcal{A}=\{1, 2, 3,\cdots,361\} A = { 1 , 2 , 3 , ⋯ , 361 } 奖励(Reward): 智能体执行某一动作后,环境反馈给智能体的一种标量反馈信号
奖励为当前状态s s s a a a s ′ s^{'} s ′ r ( s , a , s ′ ) r(s,a,s^{'}) r ( s , a , s ′ )
奖励函数是有界的:∀ a ∈ A , s , s ′ ∈ S , s . j . , ∣ r ( s , a , s ′ ) ∣ < ∞ \forall\: a\in\mathcal{A},s,s^{'}\in\mathcal{S},s.j.,\:\begin{vmatrix}r(s,a,s^{'})\end{vmatrix}<\infty ∀ a ∈ A , s , s ′ ∈ S , s . j . , r ( s , a , s ′ ) < ∞
状态转移(State Transition): 描述智能体从当前时刻t t t s s s s ′ s^{'} s ′
状态转移概率函数(State Transition Probability Function): 状态转移存在来自于环境的随机性p t ( s ′ ∣ s ) = P ( S t + 1 ′ ∣ S t = s ) p_t(s^{'}\:|\:s)=\mathbb{P}\big(S_{t+1}^{'}\:|\: S_t=s\big) p t ( s ′ ∣ s ) = P ( S t + 1 ′ ∣ S t = s ) s s s s ′ s^{'} s ′
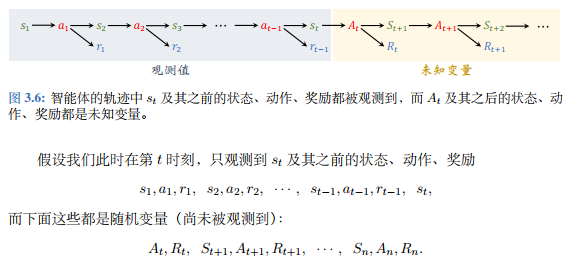
回合与轨迹
回合(Episode): 智能体从游戏开始到通关或结束的一次过程,类比监督学习中的Epoch历史(History): 历史是观测、动作、奖励的序列,H t = o 1 , a 1 , r 1 , ⋯ , o n , a n , r n H_t=o_1,a_1,r_1,\cdots,o_n,a_n,r_n H t = o 1 , a 1 , r 1 , ⋯ , o n , a n , r n
状态是历史的函数S t = f ( H t ) S_t=f(H_t) S t = f ( H t )
轨迹(trajectory): 智能体在一回合中观测到的所有状态、动作、奖励,τ = s 1 , a 1 , r 1 , ⋯ , s n , a n , r n \tau=s_1,a_1,r_1,\cdots,s_n,a_n,r_n τ = s 1 , a 1 , r 1 , ⋯ , s n , a n , r n
马尔可夫过程
MP
马尔可夫性质(Markov Property): 一个随机过程给定过去状态和当前状态下,未来时刻状态只取决于上一时刻的状态,而与历史无关
P ( S t + 1 ∣ S t ) = P ( S t + 1 ∣ S 1 , ⋯ , S t ) \mathbb{P}(S_{t+1}\:|\:S_t)=\mathbb{P}(S_{t+1}\:|\:S_1,\cdots,S_t)
P ( S t + 1 ∣ S t ) = P ( S t + 1 ∣ S 1 , ⋯ , S t )
马尔可夫过程(Markov Process,MP): 具备马尔可夫性质的随机过程称为马尔可夫过程
马尔可夫链(Markov Chain): 离散时间的马尔可夫过程称为马尔科夫链,用元组< S , P > <\mathcal{S},\mathcal{P}> < S , P >
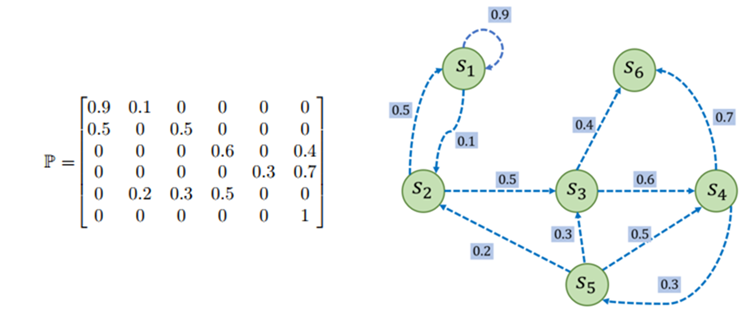
状态转移矩阵(State Transition Matrix) :用于描述马尔科夫链中的状态转移p ( S t + 1 = s ′ ∣ S t = s ) p(S_{t+1}=s^{'}\:|\:S_t=s) p ( S t + 1 = s ′ ∣ S t = s )
p ( s i ∣ s j ) p(s_i\:|\:s_j) p ( s i ∣ s j ) s j s_j s j s i s_i s i 从某个状态转移至其他状态的概率和为1,即P \mathcal{P} P
P = [ p ( s 1 ∣ s 1 ) ⋯ p ( s N ∣ s 1 ) ⋮ ⋮ p ( s 1 ∣ s N ) ⋯ p ( s N ∣ s N ) ] \mathcal{P}=\begin{bmatrix}p(s_1\:|\:s_1)&\cdots&p(s_N\:|\:s_1)\\\vdots&&\vdots\\p(s_1\:|\:s_N)&\cdots&p(s_N\:|\:s_N)\end{bmatrix}
P = p ( s 1 ∣ s 1 ) ⋮ p ( s 1 ∣ s N ) ⋯ ⋯ p ( s N ∣ s 1 ) ⋮ p ( s N ∣ s N )
采样(Sampling): 给定一个马尔可夫过程,从某个状态出发并根据状态转移矩阵生成一个回合,得到对应轨迹的过程称为采样。
范围(Horizon): 一个回合的长度,每个回合最大的时间步数
有限期(Infinite-horizon): 存在终止状态,被触发后回合结束无限期(Finite-horizon): 不存在终止状态终止状态(Terminal State): 不在转移至其他状态的状态,可认为该状态永远转移至自身。如下图一个简单马尔可夫链例子中S 6 S_6 S 6
MRP
马尔可夫奖励过程(Markov Reward Process, MRP): 在马尔科夫链的基础上增添奖励函数与折扣因子
用四元组< S , P , r , γ > <\mathcal{S},\mathcal{P},r,\gamma> < S , P , r , γ >
回报(Return): 从当前时刻开始到本回合结束所有奖励的总和,又称累计奖励(Cumulative Future Reward)
强化学习的目标为最大化回报 将t t t G t G_t G t k k k
G t = R t + R t + 1 + ⋯ + R t + k G_t=R_t+R_{t+1}+\cdots+R_{t+k}
G t = R t + R t + 1 + ⋯ + R t + k
折扣回报(Discounted Return): 对不同时刻奖励进行相应衰减,得到折扣回报
折扣因子(Discounted Factor): γ ∈ [ 0 , 1 ] \gamma\in[0,1] γ ∈ [ 0 , 1 ]
使用折扣因子可使得回报能在有限步中收敛,若不用折扣因子,则无限步的回报将趋于无穷大
G t = R t + γ ⋅ R t + 1 + γ 2 ⋅ R t + 2 + ⋯ = ∑ k = 0 ∞ γ k R t + k G_t=R_t+\gamma\cdot R_{t+1}+\gamma^2\cdot R_{t+2}+\cdots=\sum_{k=0}^\infty\:\gamma^{k}R_{t+k}
G t = R t + γ ⋅ R t + 1 + γ 2 ⋅ R t + 2 + ⋯ = k = 0 ∑ ∞ γ k R t + k
价值(Value): 在MRP中定义价值是回报的期望,即未来期望获得的奖励之和。
所有价值构成价值函数,反映现状的好坏,价值函数越大,现状越有利。
价值函数(Value Function): 当前状态s t s_t s t V ( s t ) V(s_t) V ( s t )
称R t R_t R t 即时奖励 ,余下部分为未来奖励折扣总和
V ( s ) = E [ G t ∣ s t = s ] = E [ R t + γ R t + 1 + γ 2 R t + 2 + ⋯ ∣ S t = s ] = E [ R t + γ ( R t + 1 + γ R t + 2 + ⋯ ) ∣ S t = s ] = E [ R t + γ G t + 1 ∣ S t = s ] = E [ R t + γ V ( S t + 1 ) ∣ S t = s ] \begin{aligned}
V(s)=&\mathbb{E}[G_t\:|\:s_t=s]\\
&=\mathbb{E}[R_{t}+\gamma R_{t+1}+\gamma^2R_{t+2}+\cdots \:|\:S_t=s]\\
&=\mathbb{E}[R_{t}+\gamma (R_{t+1}+\gamma R_{t+2}+\cdots )\:|\:S_t=s]\\\
&=\mathbb{E}[R_{t}+\gamma G_{t+1}\:|\:S_t=s]\\
&=\mathbb{E}[R_{t}+\gamma V(S_{t+1})\:|\:S_t=s]\\
\end{aligned}
V ( s ) = E [ G t ∣ s t = s ] = E [ R t + γ R t + 1 + γ 2 R t + 2 + ⋯ ∣ S t = s ] = E [ R t + γ ( R t + 1 + γ R t + 2 + ⋯ ) ∣ S t = s ] = E [ R t + γ G t + 1 ∣ S t = s ] = E [ R t + γV ( S t + 1 ) ∣ S t = s ]
MRP贝尔曼期望方程
贝尔曼期望方程: 定义了当前状态和未来状态间的关系,即时奖励与未来奖励折扣的和即为贝尔曼期望方程
即时奖励: r ( s ) = E [ R t ∣ S t = s ] r(s)=\mathbb{E}[R_t\:|\:S_t=s] r ( s ) = E [ R t ∣ S t = s ] 未来奖励折扣总和: 从状态s出发进行状态转移得到γ ∑ s ′ ∈ S p ( s ′ ∣ s ) V ( s ′ ) = E [ γ V ( S t + 1 ) ∣ S t = s ] \gamma\sum_{s^{'}\in S}{p(s^{'}\:|\:s)V(s^{'})}=\mathbb{E}[\gamma V(S_{t+1})\:|\:S_t=s] γ ∑ s ′ ∈ S p ( s ′ ∣ s ) V ( s ′ ) = E [ γV ( S t + 1 ) ∣ S t = s ]
V ( s ) = r ( s ) + γ ∑ s ′ ∈ S p ( s ′ ∣ s ) V ( s ′ ) V(s)=r(s)+\gamma\sum_{s^{'}\in S}p(s^{'}\:|\:s)V(s^{'})
V ( s ) = r ( s ) + γ s ′ ∈ S ∑ p ( s ′ ∣ s ) V ( s ′ )
矩阵贝尔曼期望方程: 若MRP存在n n n
状态向量S = { s 1 , s 2 , ⋯ , s n } S=\{s_1,s_2,\cdots,s_n\} S = { s 1 , s 2 , ⋯ , s n }
价值函数V = [ V ( s 1 ) V ( s 2 ) ⋯ V ( s n ) ] T \mathcal{V}=\begin{bmatrix}V(s_1)&V(s_2)&\cdots&V(s_n)\end{bmatrix}^T V = [ V ( s 1 ) V ( s 2 ) ⋯ V ( s n ) ] T
奖励函数R = [ r ( s 1 ) r ( s 2 ) ⋯ r ( s n ) ] \mathcal{R}=\begin{bmatrix}r(s_1)&r(s_2)&\cdots&r(s_n)\end{bmatrix} R = [ r ( s 1 ) r ( s 2 ) ⋯ r ( s n ) ]
V = R + γ P V [ V ( s 1 ) V ( s 2 ) ⋮ V ( s N ) ] = [ r ( s 1 ) r ( s 2 ) ⋮ r ( s N ) ] + γ [ p ( s 1 ∣ s 1 ) p ( s 2 ∣ s 1 ) ⋯ p ( s N ∣ s 1 ) p ( s 1 ∣ s 2 ) p ( s 2 ∣ s 2 ) ⋯ p ( s N ∣ s 2 ) ⋮ ⋯ ⋯ ⋮ p ( s 1 ∣ s N ) p ( s 2 ∣ s N ) ⋯ p ( s N ∣ s N ) ] [ V ( s 1 ) V ( s 2 ) ⋮ V ( s N ) ] \begin{aligned}
&\mathcal{V}=\mathcal{R}+\gamma\mathcal{P}\mathcal{V}\\\\
\begin{bmatrix}V(s_1)\\V(s_2)\\\vdots\\V(s_N)\end{bmatrix}=
\begin{bmatrix}r(s_1)\\r(s_2)\\\vdots\\r(s_N)\end{bmatrix}+
\gamma&
\begin{bmatrix}p(s_1\:|\:s_1)&p(s_2\:|\:s_1)&\cdots&p(s_N\:|\:s_1)\\
p(s_1\:|\:s_2)&p(s_2\:|\:s_2)&\cdots&p(s_N\:|\:s_2)\\
\vdots&\cdots&\cdots&\vdots\\
p(s_1\:|\:s_N)&p(s_2\:|\:s_N)&\cdots&p(s_N\:|\:s_N)\end{bmatrix}
\begin{bmatrix}V(s_1)\\V(s_2)\\\vdots\\V(s_N)\end{bmatrix}
\end{aligned}
V ( s 1 ) V ( s 2 ) ⋮ V ( s N ) = r ( s 1 ) r ( s 2 ) ⋮ r ( s N ) + γ V = R + γ P V p ( s 1 ∣ s 1 ) p ( s 1 ∣ s 2 ) ⋮ p ( s 1 ∣ s N ) p ( s 2 ∣ s 1 ) p ( s 2 ∣ s 2 ) ⋯ p ( s 2 ∣ s N ) ⋯ ⋯ ⋯ ⋯ p ( s N ∣ s 1 ) p ( s N ∣ s 2 ) ⋮ p ( s N ∣ s N ) V ( s 1 ) V ( s 2 ) ⋮ V ( s N )
价值函数解析解: 进一步通过矩阵计算求解得到价值函数的解析解
计算复杂度O ( n 3 ) O(n^3) O ( n 3 )
V = R + γ P V ( I − γ P ) V = R V = ( I − γ P ) − 1 R \begin{aligned}
&\mathcal{V}=\mathcal{R}+\gamma\mathcal{P}\mathcal{V}\\
(I-\gamma\mathcal{P})&\mathcal{V}=\mathcal{R}\\
&\mathcal{V}=(I-\gamma\mathcal{P})^{-1}\mathcal{R}
\end{aligned}
( I − γ P ) V = R + γ P V V = R V = ( I − γ P ) − 1 R
马尔可夫决策过程
MDP与策略
马尔可夫决策过程(Markov Decision Process, MDP): 在MRP的基础上增加策略(即智能体的动作)即得到MDP
状态转移函数依赖于智能体采取的动作:p ( s ′ ∣ s , a ) = P ( S t + 1 = s ′ ∣ S t = s , A t = a ) p(s^{'}\:|\: s,a)=\mathbb{P}(S_{t+1}=s^{'}\:|\:S_t=s,A_t=a) p ( s ′ ∣ s , a ) = P ( S t + 1 = s ′ ∣ S t = s , A t = a )
奖励函数依赖于智能体采取的动作:r ( s t , a t ) = E [ r t ∣ s t , a t ] r(s_t,a_t)=\mathbb{E}[r_t\:|\: s_t,a_t] r ( s t , a t ) = E [ r t ∣ s t , a t ]
马尔可夫决策过程由元组< S , A , P , r , γ > <\mathcal{S,A,P,r,\gamma}> < S , A , P , r , γ >
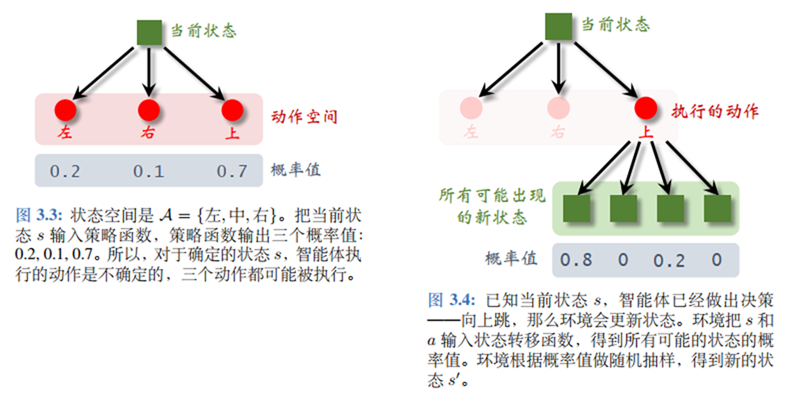
策略(Policy): 根据观测到的环境状态,智能体作出的决策,即如何从动作空间中选取一个动作。
随机性策略: 随机策略将状态S S S A A A [ 0 , 1 ] [0,1] [ 0 , 1 ]
π : S × A ↦ [ 0 , 1 ] π ( a ∣ s ) = P ( A t = a ∣ S t = s ) \begin{aligned}
\pi:\mathcal{S}&\times\mathcal{A}\mapsto [0,1]\\
\pi(a\:|\:s)=&\mathbb{P}(A_t=a\:|\:S_t=s)
\end{aligned}
π : S π ( a ∣ s ) = × A ↦ [ 0 , 1 ] P ( A t = a ∣ S t = s )
确定性策略: 根据环境状态,智能体直接输出最可能的动作,可视为随机策略的一种特例
μ : S ↦ A μ = arg max a π ( a ∣ s ) \begin{aligned}
\mu:\mathcal{S}&\mapsto \mathcal{A}\\
\mu=\arg&\max_a\pi(a\:|\:s)
\end{aligned}
μ : S μ = arg ↦ A a max π ( a ∣ s )
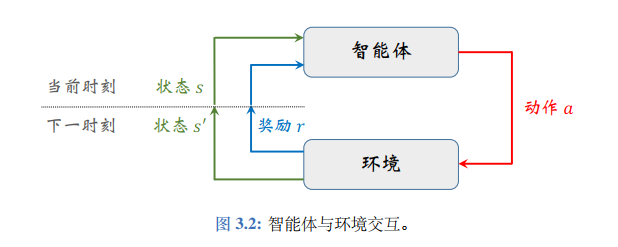
智能体与环境交互(Agent Environment Interaction): 智能体与环境存在交互
智能体观测环境状态s s s π \pi π a a a
动作改变环境状态使其反馈给智能体奖励r r r
通过状态转移得到下一时刻环境状态s ′ s^{'} s ′
MDP转为MRP: 给定一个MDP和一个策略π \pi π
选取动作的概率与使s s s s ′ s^{'} s ′ p π ( s ′ ∣ s ) = ∑ a ∈ A π ( a ∣ s ) p ( s ′ ∣ s , a ) p_\pi(s^{'}\:|\:s)=\sum_{a\in \mathcal{A}}\pi(a\:|\:s)p(s^{'}|s,a) p π ( s ′ ∣ s ) = ∑ a ∈ A π ( a ∣ s ) p ( s ′ ∣ s , a )
状态s s s π \pi π a a a r π ( s ) = ∑ a ∈ A π ( a ∣ s ) r ( s , a ) r_\pi(s)=\sum_{a\in \mathcal{A}}\pi(a\:|\:s)r(s,a) r π ( s ) = ∑ a ∈ A π ( a ∣ s ) r ( s , a )
MDP同MP\MRP区别
马尔可夫过程/马尔可夫奖励过程的状态转移是直接决定的,根据当前状态s s s
马尔可夫决策过程中,智能体在当前状态的时候,首先要决定采取某一种动作,随后根据智能体当前状态以及采取的动作,概率转移至后续状态
MDP价值函数
状态价值函数(State-value Function): 遵循策略π \pi π s s s V π ( s ) V_{\pi}(s) V π ( s )
状态价值函数仅依赖于策略函数π \pi π s s s V π ( s ) V_\pi(s) V π ( s ) V π ( s ) = E π [ G t ∣ S t = s ] = E π [ Q π ( s , A t ) ] = ∑ a ∈ A π ( a ∣ s ) ⋅ Q π ( s , a ) V π ( s ) = E π [ R t + γ ⋅ V π ( S t + 1 ) ∣ S t = s ] = ∑ a ∈ A π ( a ∣ s ) ( r ( s , a ) + γ ∑ s ′ ∈ S p ( s ′ ∣ s , a ) V π ( s ′ ) ) \begin{aligned}
V_\pi(s)&=\mathbb{E}_\pi\big[G_t\:|\:S_t=s\big]\\
&=\mathbb{E}_\pi\big[Q_{\pi}(s,A_t)\big]=\sum_{a\in\mathcal{A}}\pi(a\:|\:s)\cdot Q_\pi(s,a)\\\\
V_{\pi}(s)&=\mathbb{E}_\pi\big[R_t+\gamma\cdot V_\pi(S_{t+1})\:|\:S_t=s\big]\\
&=\sum_{a\in\mathcal{A}}\pi(a\:|\:s)\bigg(r(s,a)+\gamma\sum_{s^{'}\in \mathcal S}p(s^{'}\:|\:s,a)V_\pi(s^{'})\bigg)
\end{aligned}
V π ( s ) V π ( s ) = E π [ G t ∣ S t = s ] = E π [ Q π ( s , A t ) ] = a ∈ A ∑ π ( a ∣ s ) ⋅ Q π ( s , a ) = E π [ R t + γ ⋅ V π ( S t + 1 ) ∣ S t = s ] = a ∈ A ∑ π ( a ∣ s ) ( r ( s , a ) + γ s ′ ∈ S ∑ p ( s ′ ∣ s , a ) V π ( s ′ ) )
动作价值函数(Action-value Function): 遵循策略π \pi π s s s a a a Q π ( s , a ) Q_{\pi}(s,a) Q π ( s , a )
动作价值函数依赖于s , a s,a s , a Q π ( s , a ) Q_\pi(s,a) Q π ( s , a )
动作价值函数依赖于策略π \pi π Q π ( s , a ) Q_{\pi}(s,a) Q π ( s , a )
Q π ( s , a ) = E π [ G t ∣ S t = s , A t = a ] = E π [ R t + γ R t + 1 + γ 2 R t + 2 + ⋯ ∣ S t = s , A t = a ] = E π [ R t + γ ( R t + 1 + γ R t + 2 + ⋯ ) ∣ S t = s , A t = a ] = E π [ R t + γ G t + 1 ∣ S t = s , A t = a ] = E π [ R t + γ V π ( S t + 1 ) ∣ S t = s , A t = a ] = r ( s , a ) + γ ∑ s ′ ∈ S p ( s ′ ∣ s , a ) V π ( s ′ ) Q π ( s , a ) = r ( s , a ) + γ ∑ s ′ ∈ S p ( s ′ ∣ s , a ) ∑ a ′ ∈ A π ( a ′ ∣ s ′ ) ⋅ Q π ( s ′ , a ′ ) \begin{aligned}
Q_{\pi}(s,a)&=\mathbb{E}_\pi\big[G_t\:|\:S_t=s,A_t=a\big]\\
&=\mathbb{E}_{\pi}[R_{t}+\gamma R_{t+1}+\gamma^2R_{t+2}+\cdots \:|\:S_t=s,A_t=a]\\
&=\mathbb{E}_{\pi}[R_{t}+\gamma (R_{t+1}+\gamma R_{t+2}+\cdots )\:|\:S_t=s,A_t=a]\\\
&=\mathbb{E}_{\pi}[R_{t}+\gamma G_{t+1}\:|\:S_t=s,A_t=a]\\
&=\mathbb{E}_{\pi}[R_{t}+\gamma V_\pi(S_{t+1})\:|\:S_t=s,A_t=a]\\
&=r(s,a)+\gamma\sum_{s^{'}\in \mathcal S}p(s^{'}\:|\:s,a)V_\pi(s^{'})\\\\
Q_{\pi}(s,a)&=r(s,a)+\gamma\sum_{s^{'}\in \mathcal S}p(s^{'}\:|\:s,a)\sum_{a^{'}\in\mathcal{A}}\pi(a^{'}\:|\:s^{'})\cdot Q_\pi(s^{'},a^{'})
\end{aligned}
Q π ( s , a ) Q π ( s , a ) = E π [ G t ∣ S t = s , A t = a ] = E π [ R t + γ R t + 1 + γ 2 R t + 2 + ⋯ ∣ S t = s , A t = a ] = E π [ R t + γ ( R t + 1 + γ R t + 2 + ⋯ ) ∣ S t = s , A t = a ] = E π [ R t + γ G t + 1 ∣ S t = s , A t = a ] = E π [ R t + γ V π ( S t + 1 ) ∣ S t = s , A t = a ] = r ( s , a ) + γ s ′ ∈ S ∑ p ( s ′ ∣ s , a ) V π ( s ′ ) = r ( s , a ) + γ s ′ ∈ S ∑ p ( s ′ ∣ s , a ) a ′ ∈ A ∑ π ( a ′ ∣ s ′ ) ⋅ Q π ( s ′ , a ′ )
MDP预测控制
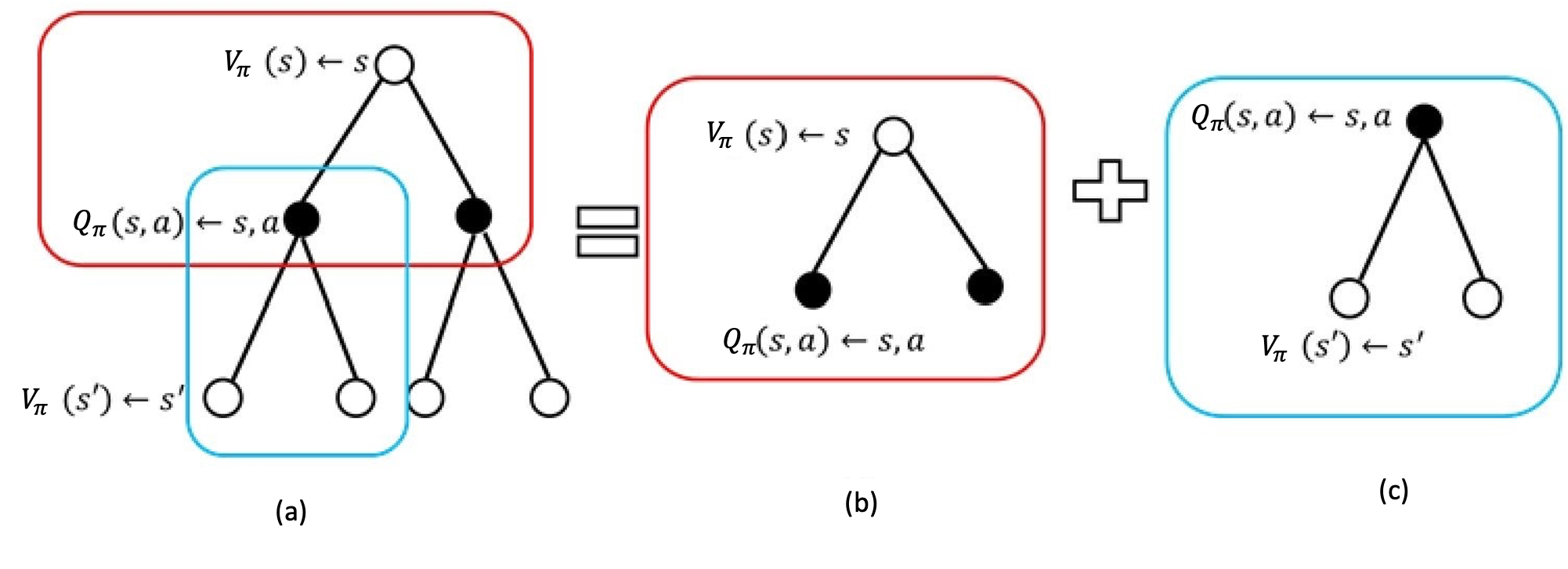
备份图(Backup Diagram): 对于某一状态,当前的价值与未来价值线性相关,采用备份图表示更新操作
备份图将价值信息从一个状态(或状态-动作对)的后继状态(或状态-动作对)转移回它
空心圆圈表示状态,实心圆圈表示一个状态-动作对
备份图定义了未来下一时刻的状态价值函数与上一时刻的状态价值函数之间的关联
MDP模型
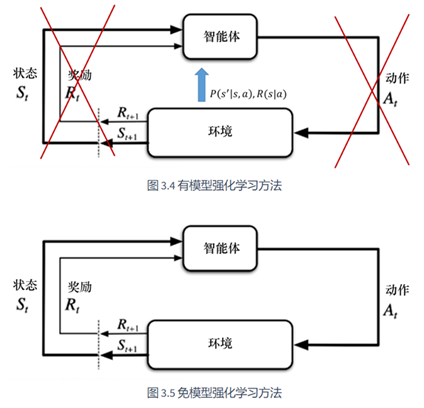
称环境为强化学习中的模型,则可将马尔可夫决策过程分为模型已知 和模型未知 两种:
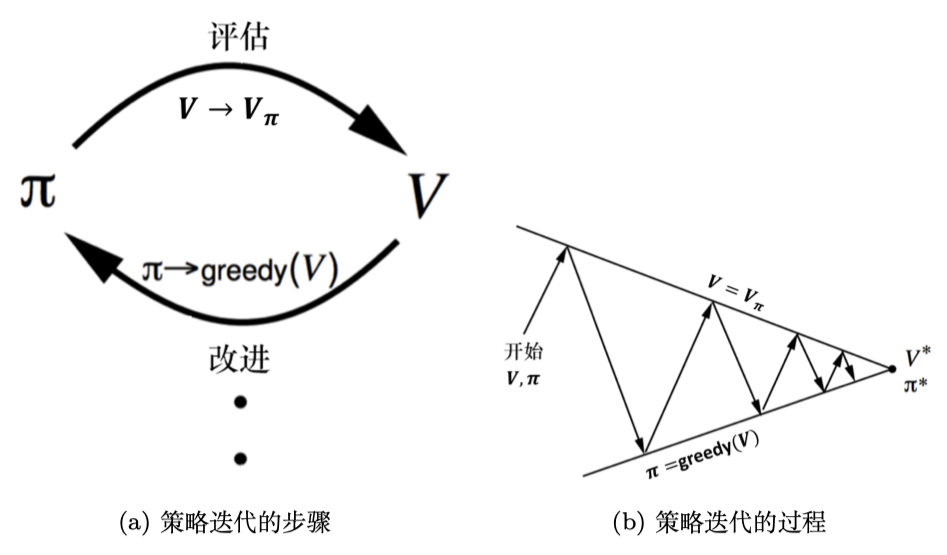
有模型: 模型已知,处于已知环境内
已知环境的状态转移函数和奖励函数,称环境已知。此时采用决策的概率函数来反映环境的随机性
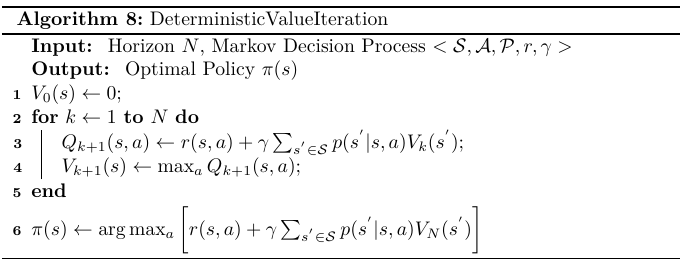
通过策略迭代或价值迭代得到最佳策略
免模型: 模型未知,处于未知环境内
未知环境的状态转移和奖励函数,通过尝试不同的策略学习得到最好的方式
使用V ( s ) V(s) V ( s ) Q Q Q
通过和环境交互学习策略
面试题
Reinforcement Learning
Markov Decision Process